
Concept explainers
Videos
A point at a 6.5-in radius is on a body that is in pure rotation with
- Write an expression for the particle's acceleration vector in position
- Write an expression for the particle's acceleration vector in position
- Write a vector equation for the acceleration difference between points
vectors in this equation and solve for the acceleration difference numerically. - Check the result of part c with a graphical method.
(a)
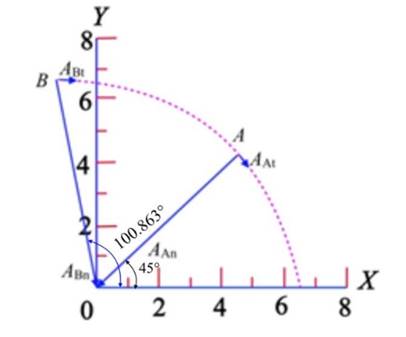
An expression for the particle’s acceleration vector in position A.
Answer to Problem 7.1P
Acceleration in polar form is
Acceleration in cartesian form is
Explanation of Solution
Calculation:
Compute the angular velocity at point B.
Here,
Substitute
Calculate the angular position at point B.
Here,
Substitute
Compute the magnitude of the normal component of acceleration at point A.
Here,
Compute the direction of the normal component of acceleration at point A.
Compute the magnitude of the tangential component of acceleration at point A.
Here,
Compute the direction of the tangential component of acceleration at point A.
Compute the magnitude of the normal component of acceleration at point B.
Here,
Compute the direction of the normal component of acceleration at point B.
Compute the magnitude of the tangential component of acceleration at point B.
Here,
Compute the direction of the tangential component of acceleration at point A.
Draw the position vector diagram.
Computer polar form by using the formula.
Calculate the velocity at point A.
Compute the acceleration vector in position A by the following formula.
Compute the acceleration vector of position A in cartesian form.
Therefore, the acceleration of point A is
(b)
An expression for the particle’s acceleration vector in position B.
Answer to Problem 7.1P
Acceleration in polar form is
Acceleration in cartesian form is
Explanation of Solution
Calculation:
Compute the angular velocity at point B.
Here,
Substitute
Calculate the angular position at point B.
Here,
Substitute
Compute the magnitude of the normal component of acceleration at point A.
Here,
Compute the direction of the normal component of acceleration at point A.
Compute the magnitude of the tangential component of acceleration at point A.
Here,
Compute the direction of the tangential component of acceleration at point A.
Compute the magnitude of the normal component of acceleration at point B.
Here,
Compute the direction of the normal component of acceleration at point B.
Compute the magnitude of the tangential component of acceleration at point B.
Here,
Compute the direction of the tangential component of acceleration at point A.
Draw the position vector diagram.
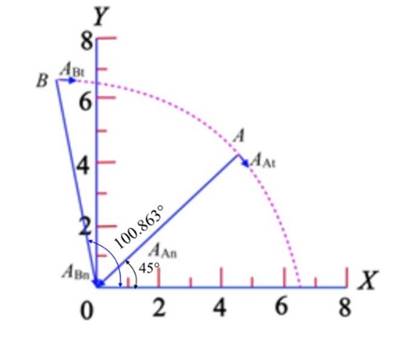
Compute the position vector of point B.
Compute the polar form.
Compute the acceleration vector in position B by the following formula.
Compute the acceleration vector of position B in cartesian form.
(c)
A vector equation for the acceleration difference between points B and A.
Explanation of Solution
Calculation
Calculate the difference in acceleration between the given points.
Therefore, the position difference is
(d)
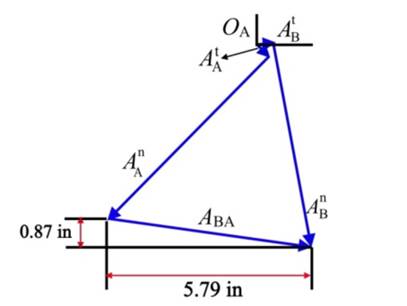
The answer from the graphical method.
Explanation of Solution
Calculation Solve the equation
Construct the acceleration polygon following the below steps.
- Locate point OA.
- Draw 0.325 in line from the point OA. This represents the velocity of the point
- From the tip of the above line, draw a line of 6.508 in. This represents the acceleration of the point
- From the point OA, draw a 0.325 line which represents the velocity of the point
- From the tip of the point
- From the tip of point
Want to see more full solutions like this?
Chapter 7 Solutions
DESIGN OF MACHINERY


- This problem must be solved using the method of Instantaneous Center of Zero Velocity (IC method). 1) Find Va, VB, and wz when Link 2 = 2, Link 3 = 6, offset = -3, 02 = 60°, w2 = 8rad/sec 2) Find VA, VB, and wz when Link 2 = 3.5, Link 3 = 10, offset = 1, 02 120°, w2 = 8rad/sec 03 B Y Link 3 A Offset Link 2 02 04 = 90° %3D X 02 Slider position darrow_forwardPosition of a particle in a rectangular- co-ordinate system is (5, 2, 3). Then its position vector will be * 5 i + 2 j+ 3 k 3 i+ 2j+ 5 k O 2i+ 3 j+ 5 k O 5i+ 3 j+ 2 karrow_forwardUse the Principal Axes Theorem to perform a rotation of axes to eliminate the xy-term in the quadratic equation. 8x2 − 14xy + 8y2 − 42 = 0 Give its equation in the new coordinate system. (Use xp and yp as the new coordinates.)arrow_forward
- Calculate the x and y components of a 30m displacement at 23° from the x-axisarrow_forward2. The angular velocity of the disk in figure 1 is w = 4t² + 3 rad/s, where t is in seconds. (a) What is angular velocity and the magnitude of the (linear) velocity of point A on the disk when t = 0.5 s. (b) Let be the counter-clockwise angle of point A from the horizontal x-axis. The derivative of the angle of A is the angular velocity of A, i.e. =w. Integrate the angular velocity to get an expression for the angle, 0. Use the condition that at t = 0, 0 = 0 to solve for the integration constant. dᎾ dt (c) Differentiate the angular velocity with respect to time to get an expression for the angular acceleration, a(t). (d) What is the angular acceleration and the magnitude of the (linear) acceleration of point A at t = 0.5 s. A Ө 0.8 m @ Figure 1: Problem 2 Xarrow_forwardDetermine the rotation matrix for the following rotation of 45° about X axis rotation of 45° about Y axis, rotation of 90° about Z axisarrow_forward
- A wheel in fixed axis rotation spins at 300 rpm and decelerates at α = 3 rad/s2. How long does it take for the wheel to come to a complete stop?arrow_forwardDetermine the following: 1. The position vector of point B with respect to point A: rBA = ( i + j + k)m 2. The unit vector in the direction of vector F: u = ( i + j + k) Express your results using three significant figures.arrow_forwardThe figure shows a linkage in one position. What is the instantaneous acceleration of point P if the link O₂A is rotating CW at 40 rad/sec? 8.9 5 B 4.4 5 56° 500 9.5 02 140 8,000 in/sec2 04 O 15,282 in/sec2 O 9,005.8 in/sec2 O 23,073 in/sec2arrow_forward
- Figure 1: Folded auto-gate system At the instant, the wheel rotates clockwise without slipping with the angular velocity of 5 rad/s. The angular velocity increases by 1 rad/s per 1° as the 8 reduce from 90" to 0" and the wheel keep rotating without slipping at all times. Using a vector solution, plot the velocity of point P against e (0°arrow_forwardCalculate the acceleration of point A with respect to origin point 0. Remember that like velocity, you need to calculate each link's relative velocity and then add them all up: aa/O = aa/3 + ag/o Also, each relative acceleration can be calculated using its two components in radial and direction, for example: a4/5 = ar, A/B + ag, a/B 0,0, Ö li = 25.0cm %3D 01 = 45.0deg w1 = 0.5rad/s a1 = 1.0rad/s² r2 0 = 45deg 12 = 20.0cm O2 = 30.0deg 02 = 30.0deg w2 = 0.5rad/s a2 = 0.0rad/s²arrow_forwardQA = 20 cm, AC = 50 cm, CD = 40 cm, and the angular velocity of crank QA is 5 rad/s. Solve for VD in cm/s.arrow_forwardarrow_back_iosSEE MORE QUESTIONSarrow_forward_ios
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY